

صندوق كرتوني آلي آلي / لوح تغليف بالانكماش
فيديو
وصف
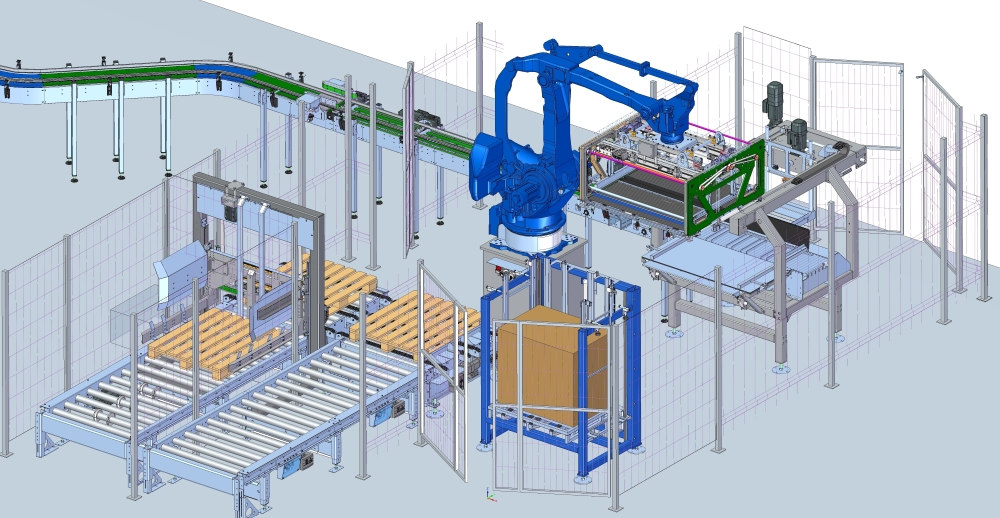

روبوت البليت هو المنتج الذي تم تحميله في الكرتون وصندوق الدوران والحقائب والقواعد الأخرى للمنتج ، من خلال خط النقل سيتم ترتيبها وتحديد موضعها ؛يتم وضع 10-12 منصة نقالة موضوعة بدقة على آلة البليت الأوتوماتيكية بواسطة الرافعة الشوكية ، وتقوم الآلة تلقائيًا بفصل المنصات على التوالي وإرسالها إلى موضع المنصات من أجل تحديد المواقع ومنصات التحميل.سوف يمسك الروبوت المنتج من خلال التركيب الخاص ، ووفقًا للوضع المحدد مسبقًا على منصة التحميل ، يبدأ خط ناقل البليت بعد الانتهاء من معدات إخراج البليت ، بواسطة شوكة الرافعة الشوكية لإخراج الخط.تكتمل العملية برمتها تلقائيًا دون تدخل بشري.مناسب لاستخدام خط التجميع ، يمكن أن يقلل بشكل كبير من العمالة ويقلل من كثافة اليد العاملة.اعتماد مفهوم التصميم عالي السرعة والمستقر وتوفير المساحة ، وتوفير مساحة أسرع وأكثر.آلة واحدة متعددة الأغراض ، تعديل سريع ، لا تحتاج إلى استبدال المنتجات المكدسة والقلق.
نطاق التطبيق: الكرتون المضلع ، الصندوق البلاستيكي ، تغليف الدلو ، تغليف الأكياس ، إلخ.


تكوين المعدات: خط نقل المنتج ، خط تحديد المواقع ، روبوت المنصات ، القاعدة ، التثبيت ، آلة توزيع البليت ، خط نقل البليت ، نظام التحكم الكهربائي وشبكة حماية الأمان ، إلخ.
سمات
1. استخدام روبوتات التكديس ABB أو KUKA أو yaskawa لضمان أن موضع التكديس دقيق ومستقر.
2. يمكن تعيين مجموعة متنوعة من إجراءات التحميل على منصات نقالة ، ويمكن استدعاء تغيير المواصفات في أي وقت على شاشة اللمس ، دون استبدال الأجزاء.
3. الاستخدام المرن ، يمكن أن يتوافق الروبوت مع 1-4 مواصفات مختلفة للمنتجات في نفس الوقت على منصات نقالة ، وتوافق قوي.
4. سعة مكتبة البليت كبيرة ، ويمكن أن تستوعب 10-12 منصة نقالة فارغة ، ويمكن أن تحقق الإمداد الأوتوماتيكي للمنصة النقالة.
5. استخدام مكونات كهربائية ذات علامة تجارية دولية من الدرجة الأولى ، لتحديد ثبات الجهاز.
6. أنيق وجميل وفعال.يمكن أن تقلل بشكل كبير من المخاض.
7. عملية الشاشة التي تعمل باللمس لتحقيق حوار بين الإنسان والآلة ، يمكن أن تعرض سرعة الإنتاج ، وسبب الخطأ والموقع ، ودرجة عالية من الأتمتة.
8. يمكن برمجتها PLC للتحكم في عدد طبقات التكديس ، توريد المنصات وتفريغ الكراتين.
9. نظام التحكم: شاشة تعمل باللمس التحكم ، مع وضع التشغيل اليدوي ، التلقائي ، شاشة تعمل باللمس مع وظيفة تشغيل الجهاز بالكامل.
10. مراقبة الوقت الحقيقي للعملية الكاملة لتشغيل المعدات.يتم الكشف عن جميع خطوات العمل بواسطة أجهزة استشعار بوظيفة التشخيص الذاتي.عند حدوث أي خطأ ، سيتوقف الجهاز تلقائيًا ، وسيومض ضوء التنبيه ، وسيتم عرض نوع الخطأ على شاشة التشغيل.
11. خزانة تحكم كهربائية مستقلة ، صندوق تحكم مع مروحة تبريد ، مقبس فلوري.
12. يتم تزويد الخط بالكامل بفتحة سلكية ، وفتحة المخرج محمية بخرطوم.
13. يتم تمييز الكابلات بأرقام الأسطر ، ويتم تجعيد المحطات.
14. المعدات اللازمة للقيام بالحركة الترددية للكابل باستخدام كابل مرن خاص بالروبوت.
الآلة كلها مجهزة بباب أمان ، عند فتح الباب ، تتوقف الآلة عن العمل لضمان سلامة الأفراد.



المقياس التقني
| يكتب | XYMD-12 / R |
| مصدر الطاقة | 380 فولت 50 هرتز 20 كيلو واط |
| منتج قابل للتطبيق | كرتون ، وصناديق دوران ، وأكياس ، ومنتجات ماسورة ، إلخ |
| بعد المنتج | التخصيص حسب الحاجة |
| حجم البليت المطبق | L1000 ~ 1200 * W1000 ~ 1200 * H120 ~ 150mm (وفقًا لتصميم البليت الفعلي) |
| وضع الترتيب | التخصيص حسب الحاجة |
| ارتفاع التراص | ≤1800 مم (يمكن إجراء اختيار الروبوت وفقًا للمتطلبات) |
| سرعة | 10-12 نبضة في الدقيقة (وفقًا لوضع نوع المكدس يمكن أن يكون أكثر من مجرد صيد) |
| ضغط جوي | ≥6 كجم / سم² |
| استهلاك الغاز | 0.2m³ / دقيقة |
| ارتفاع نقل المنتج | 900 مم (قم بالتخصيص حسب الحاجة) |
| ارتفاع نقل البليت | 600 مم (تخصيص حسب الحاجة) |
| وضع النقل البليت | وفقًا لهيكل البليت ، يمكن استخدام نوع الأسطوانة ونوع السلسلة ولوحة السلسلة وما إلى ذلك |
| آلة demension | حسب التخطيط الفعلي |
| وزن الآلة | 2000 كجم |
| مواد المعدات | المادة الرئيسية هي رش البلاستيك من الفولاذ الكربوني ، والجزء الملامس للمادة هو الفولاذ المقاوم للصدأ (التخصيص حسب الحاجة) |
| تكوين الجهاز | (التخصيص حسب الحاجة) |

